SmartCopter - Autonomous Flight with a Smartphone as On-Board Processing Unit
Lab project in the area of Virtual and Augmented Reality.
Keywords: Unmanned Aerial Vehicles, Autnonomous Localization, Mixed Reality, Autonomous Flight.
About this Project
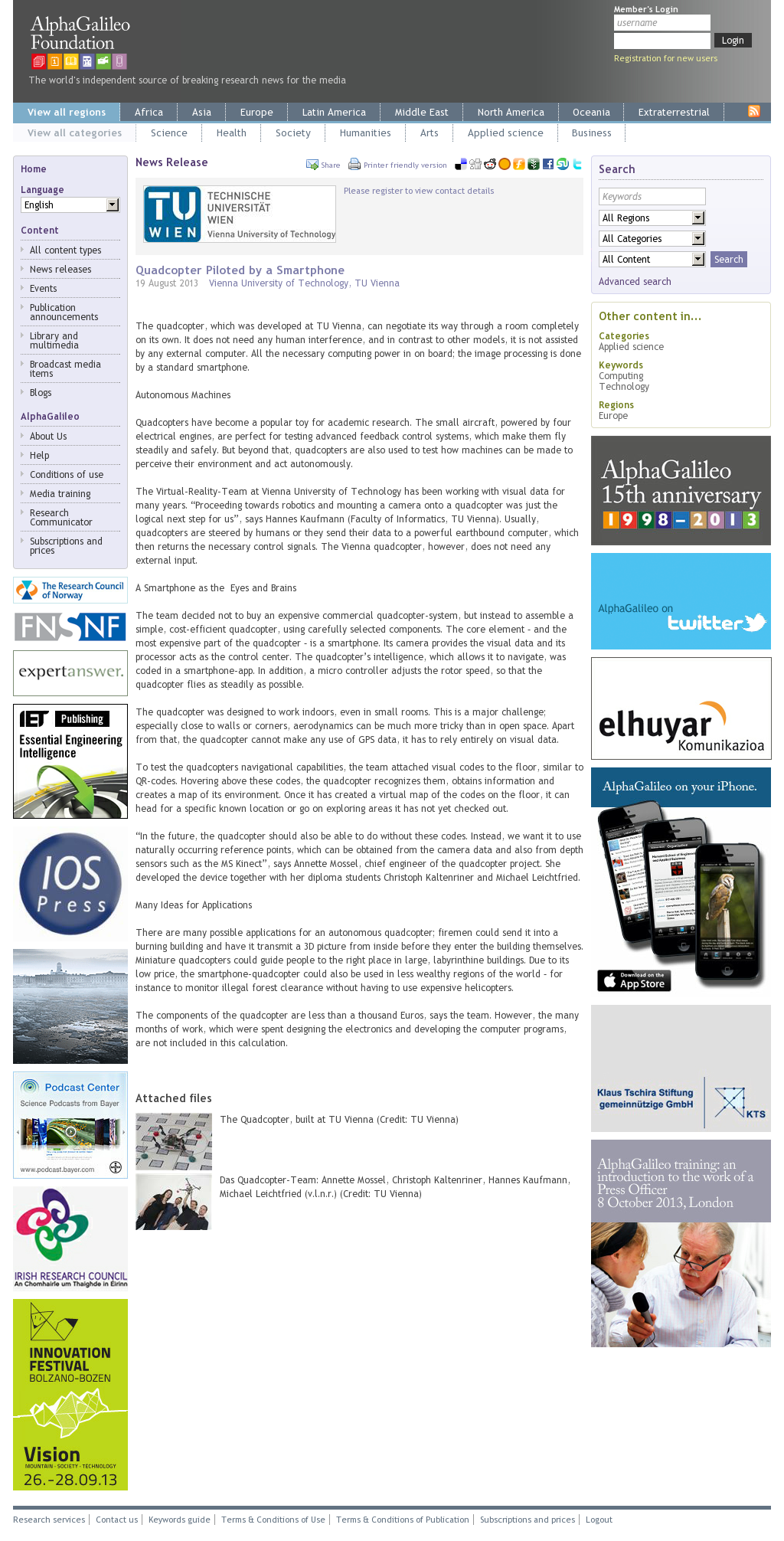
This project combines a number of research activities to design and develop UAVs based on off the shelf hardware. The major goals of our research activities comprises autonomous flight and to combine UAVs with the sensation of an immersive mixed reality environment.
SmartCopter
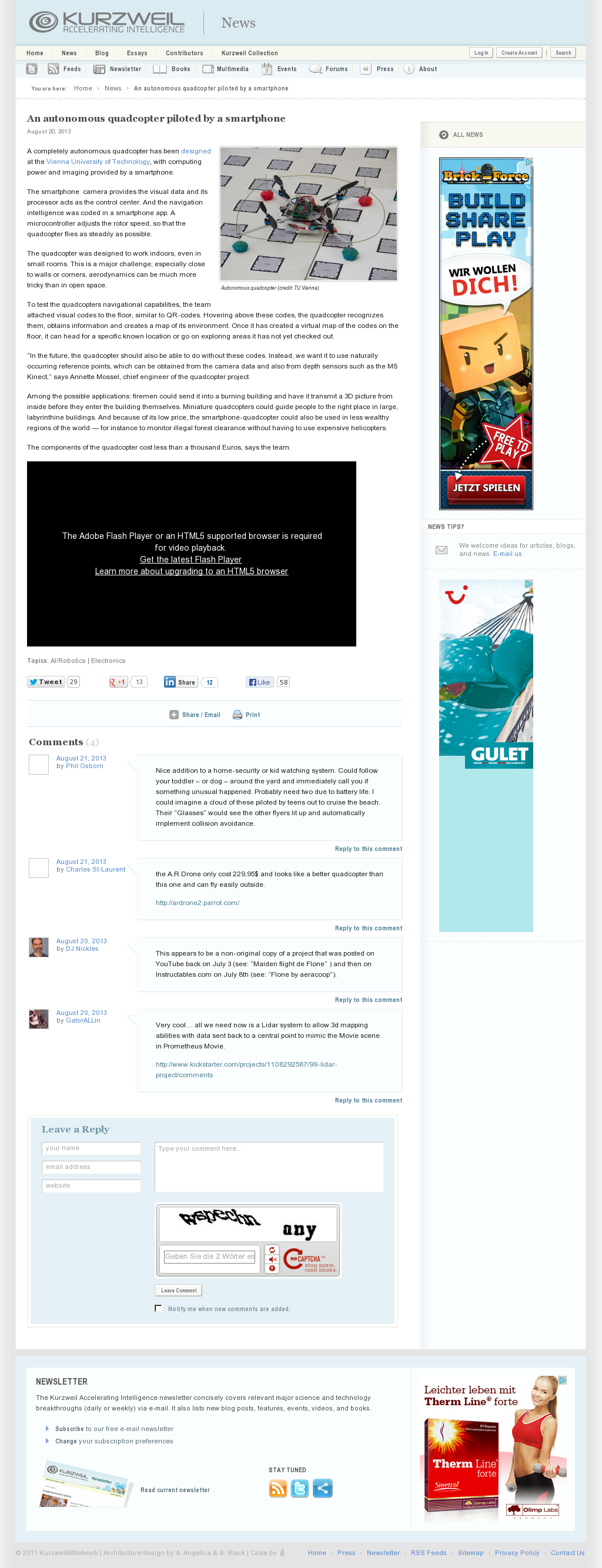
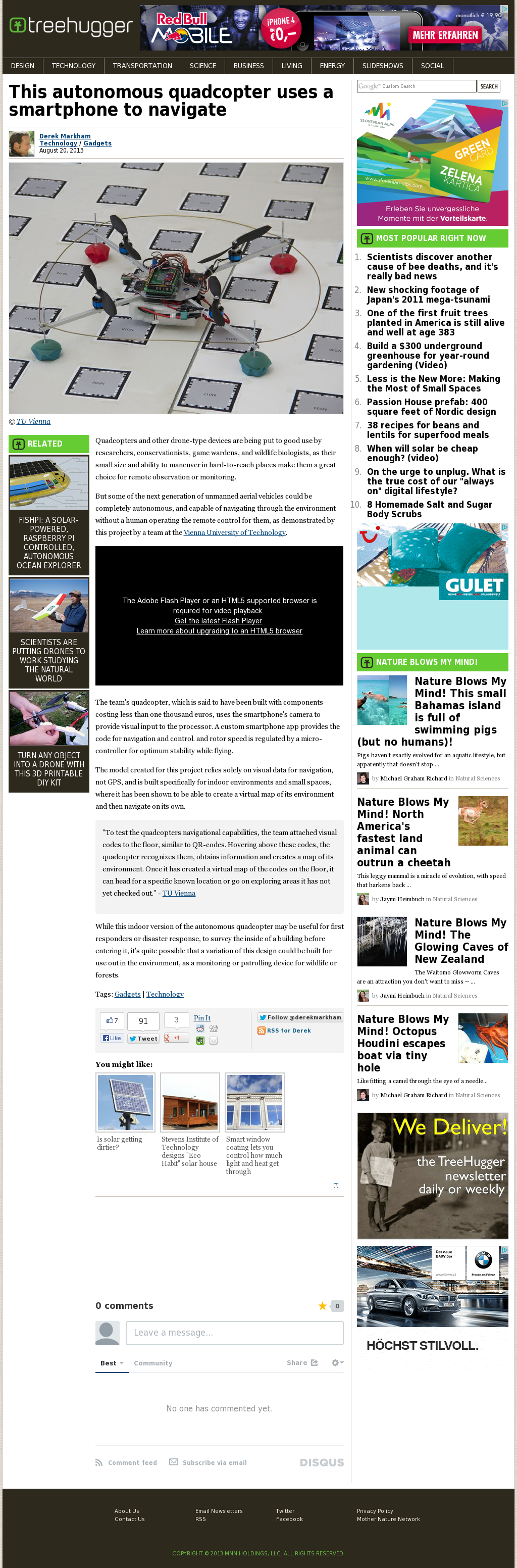
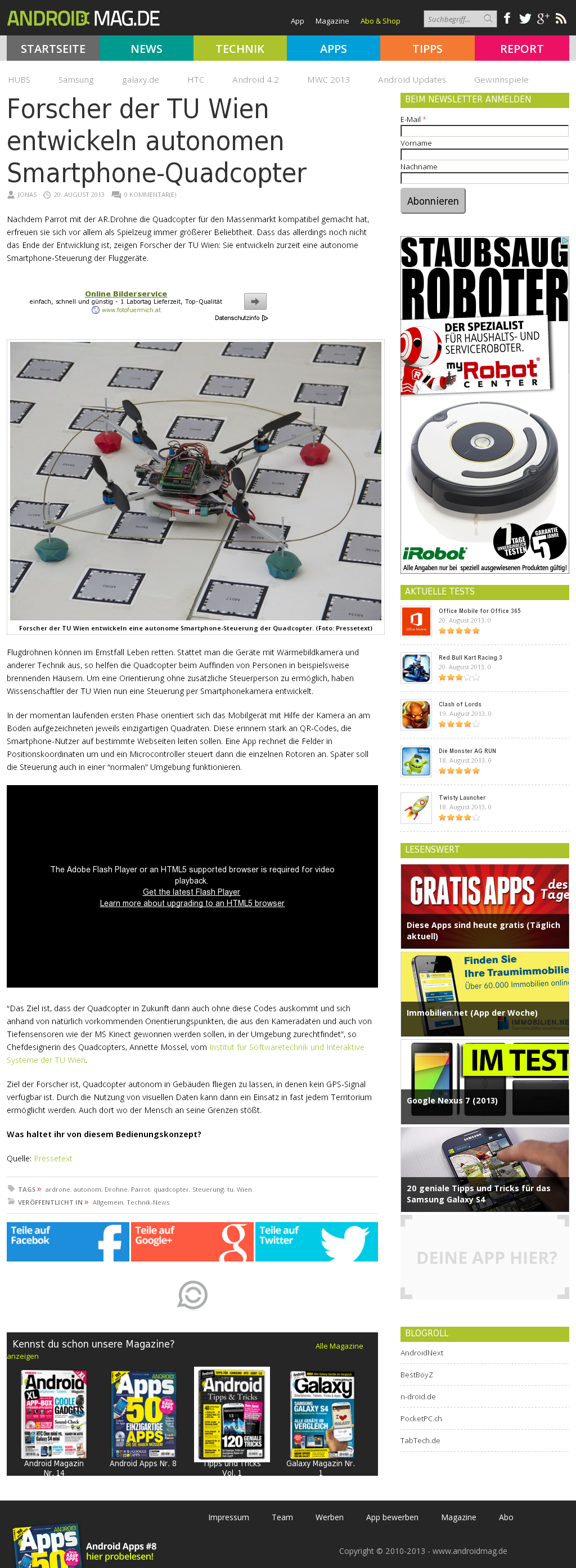
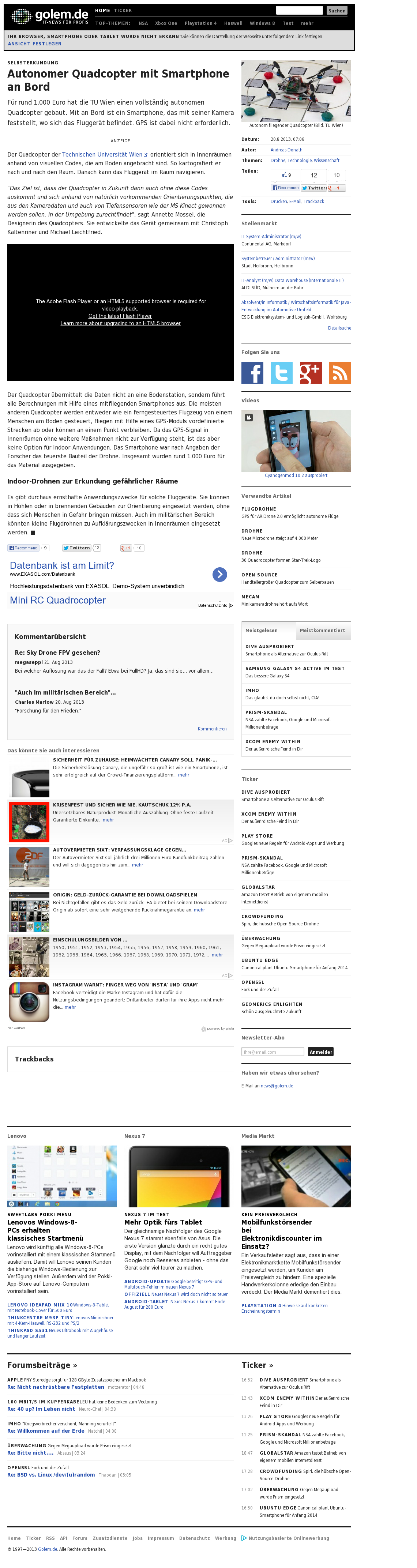
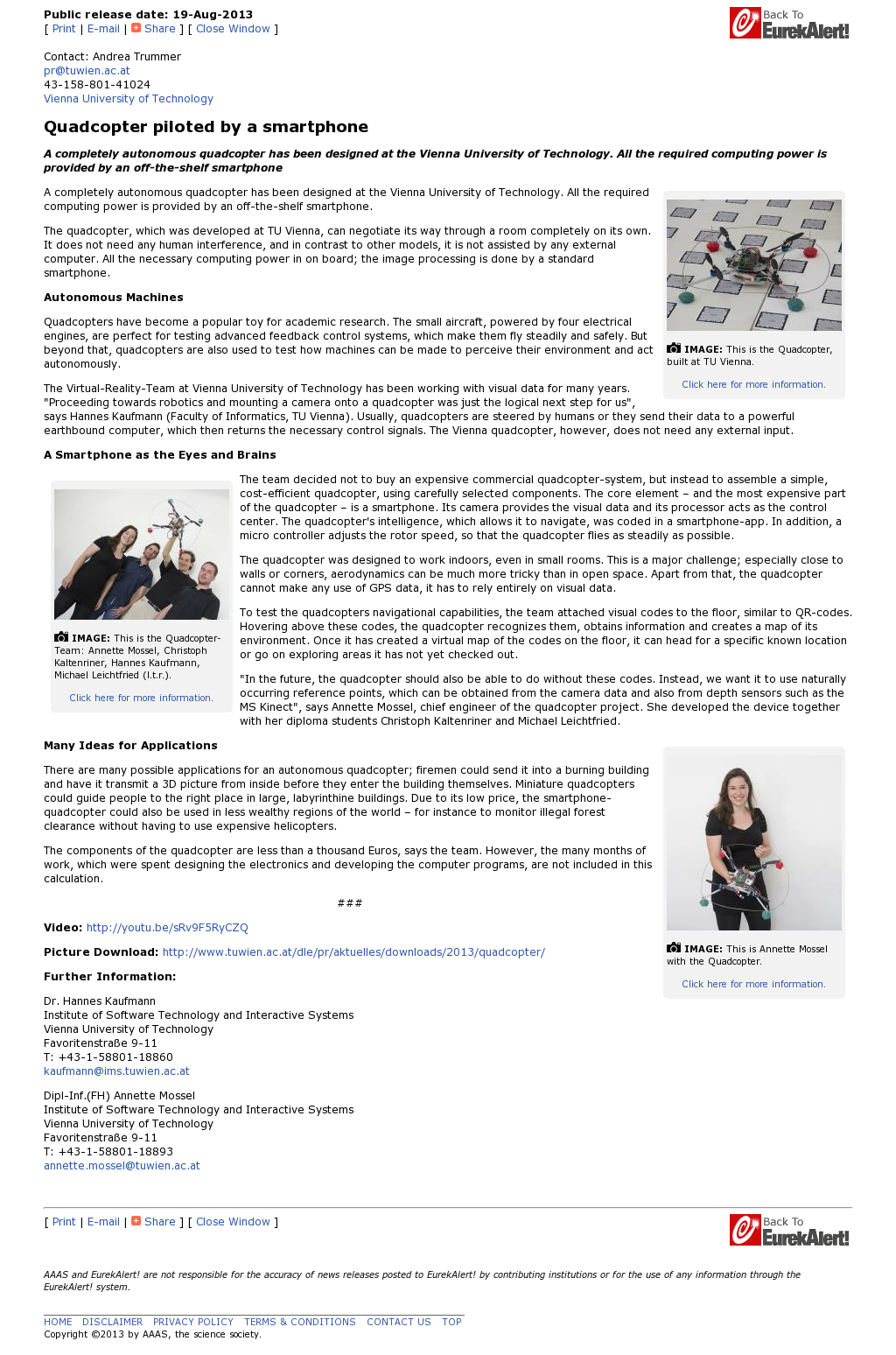
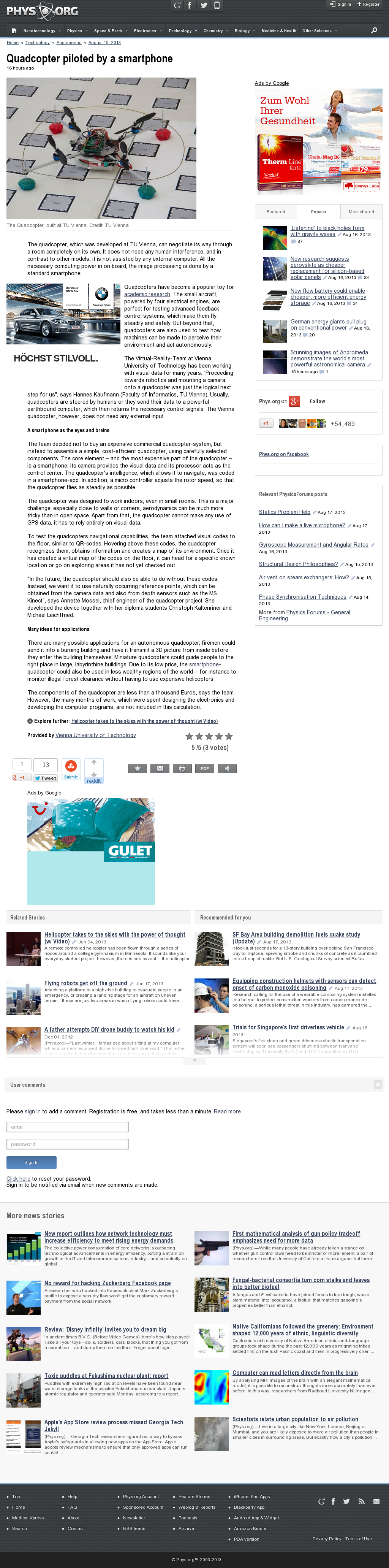
A conventional smartphone acts as on-board core processing unit to allow for autonomous localization, mapping, exploration and navigation in an unknown environment without requiring additional ground hardware. Currently, our approach is capable to autonomously fly within an unknown 2D environment.
SmartCopter v2.0
The frame of the Smartcopter v2.0 is custom designed and most parts are printed in 3D for enhanced maintenance, using PLA.It has a diameter of 70cm and is equipped with a LG Nexus 4, running Android v4.0.4 (API level 15). The entire HOWTO is provided over Instructables.
|
|
|
|
Rendered model of frame design. |
Exploded v2.0 frame design. |
![[PNG] Render_Perspective_Drawing...](/projects/smartcopter/downloads/render-perspective-drawing.png)
![[PNG] Render_Perspective_Drawing...](/projects/smartcopter/downloads/render-perspective-drawing-exploded.png)
SmartCopter v1.0
The Smartcopter v1.0 proptotype is equipped with a Samsung Galaxy S2, runnind Android v4.0.4 (API level 15). Press here for an interactive design visualization of the quadcopter's frame. You can navigate through the design study by pressing the whitespace key.
|
|
|
| Frame with smartphone pulled out of mount for visualization. |
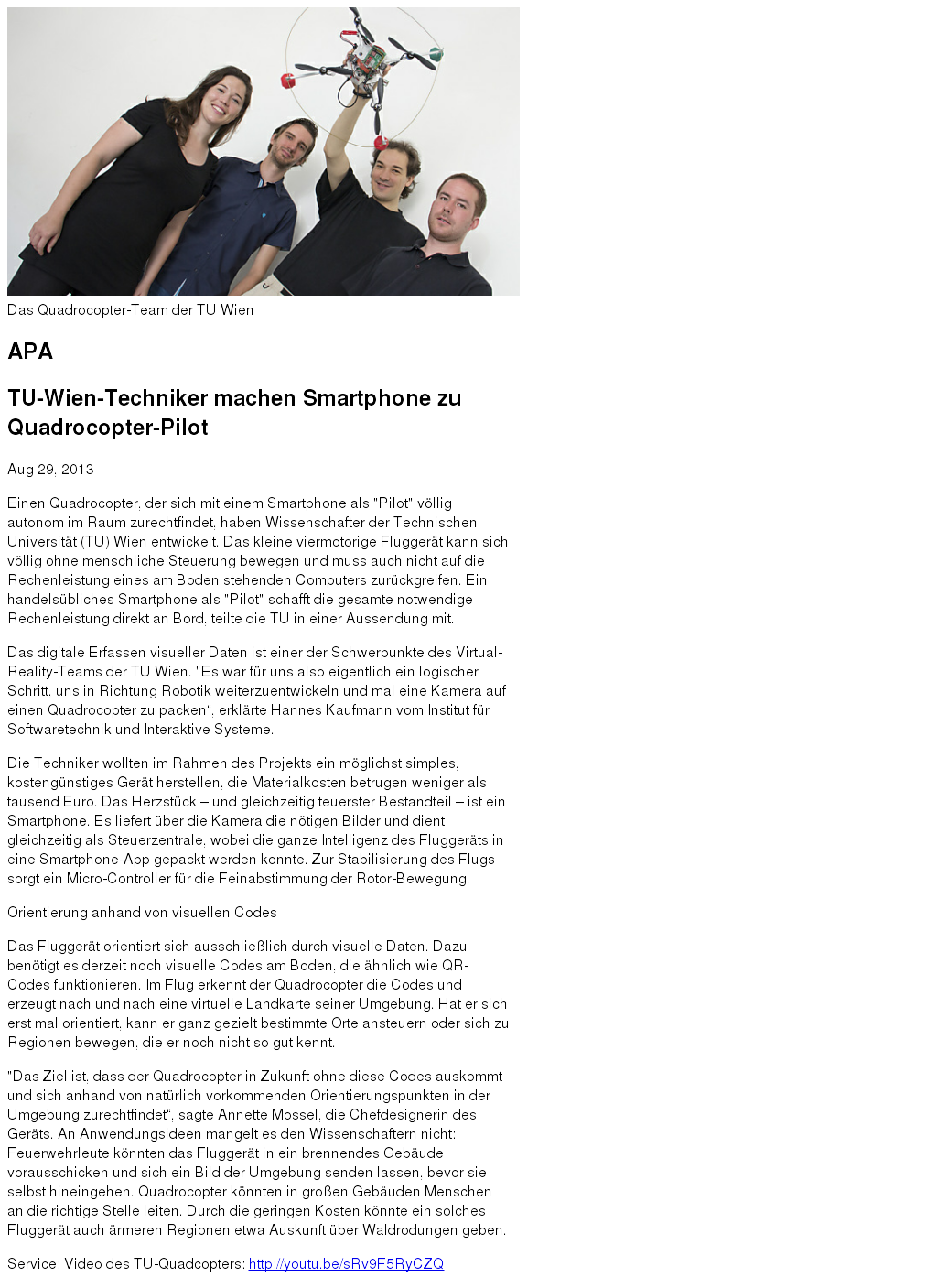
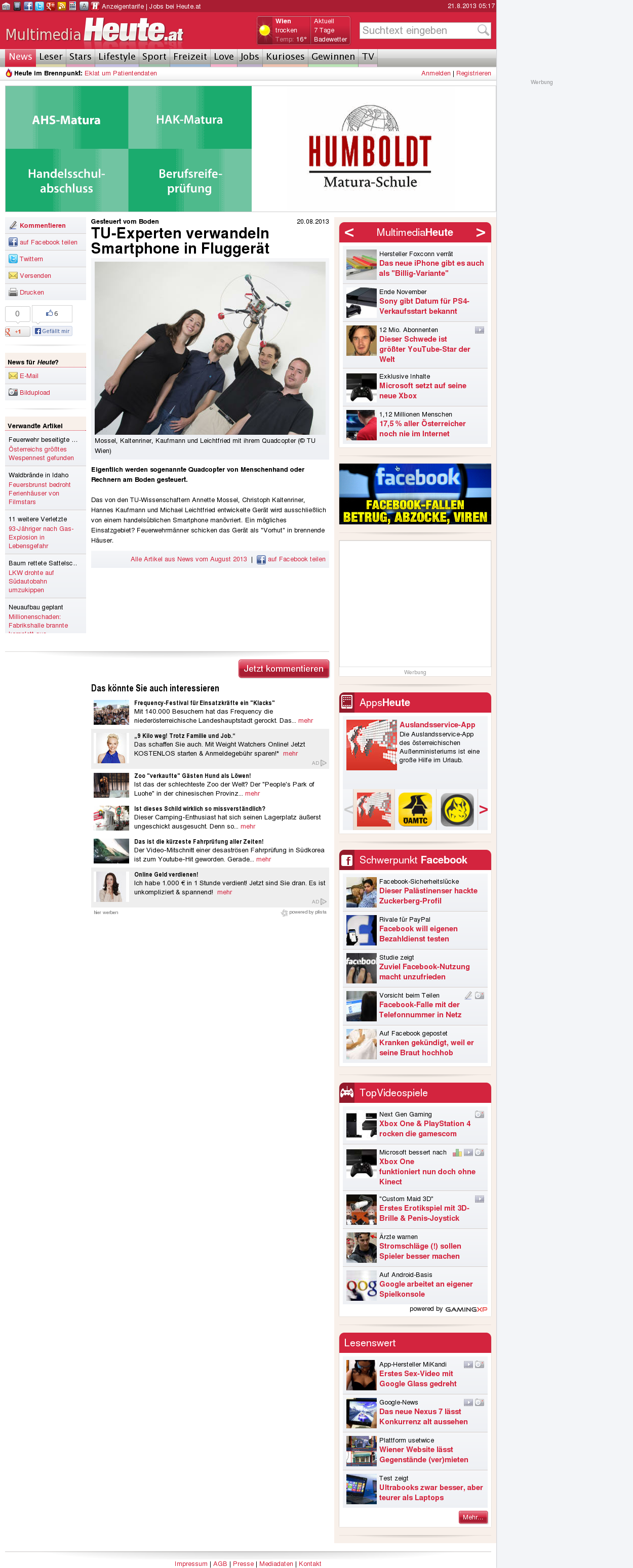
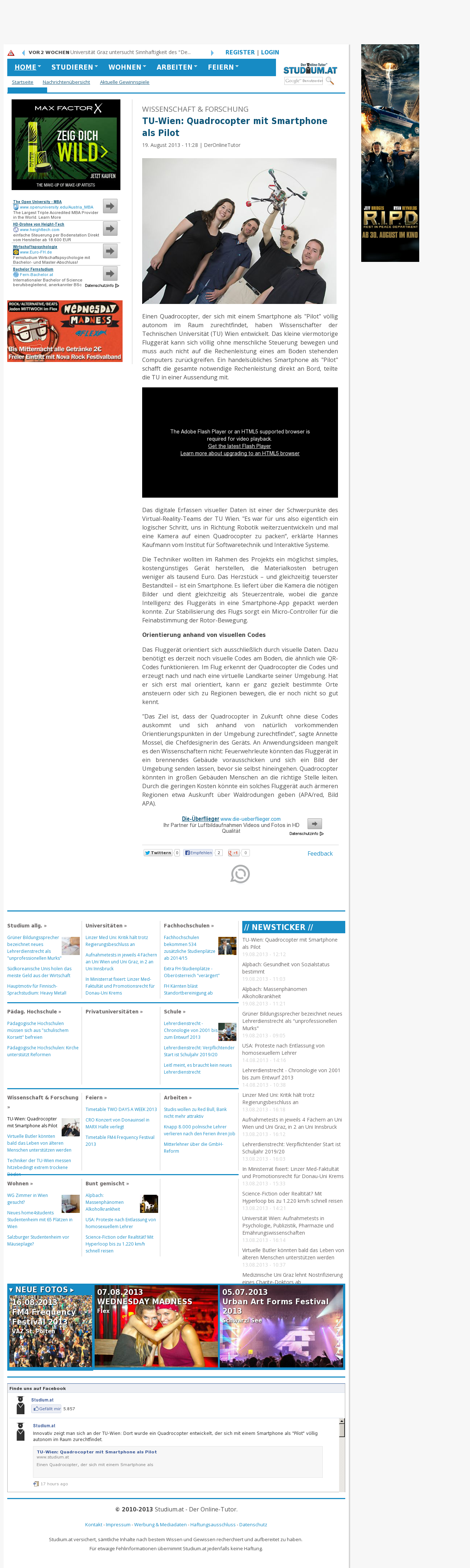
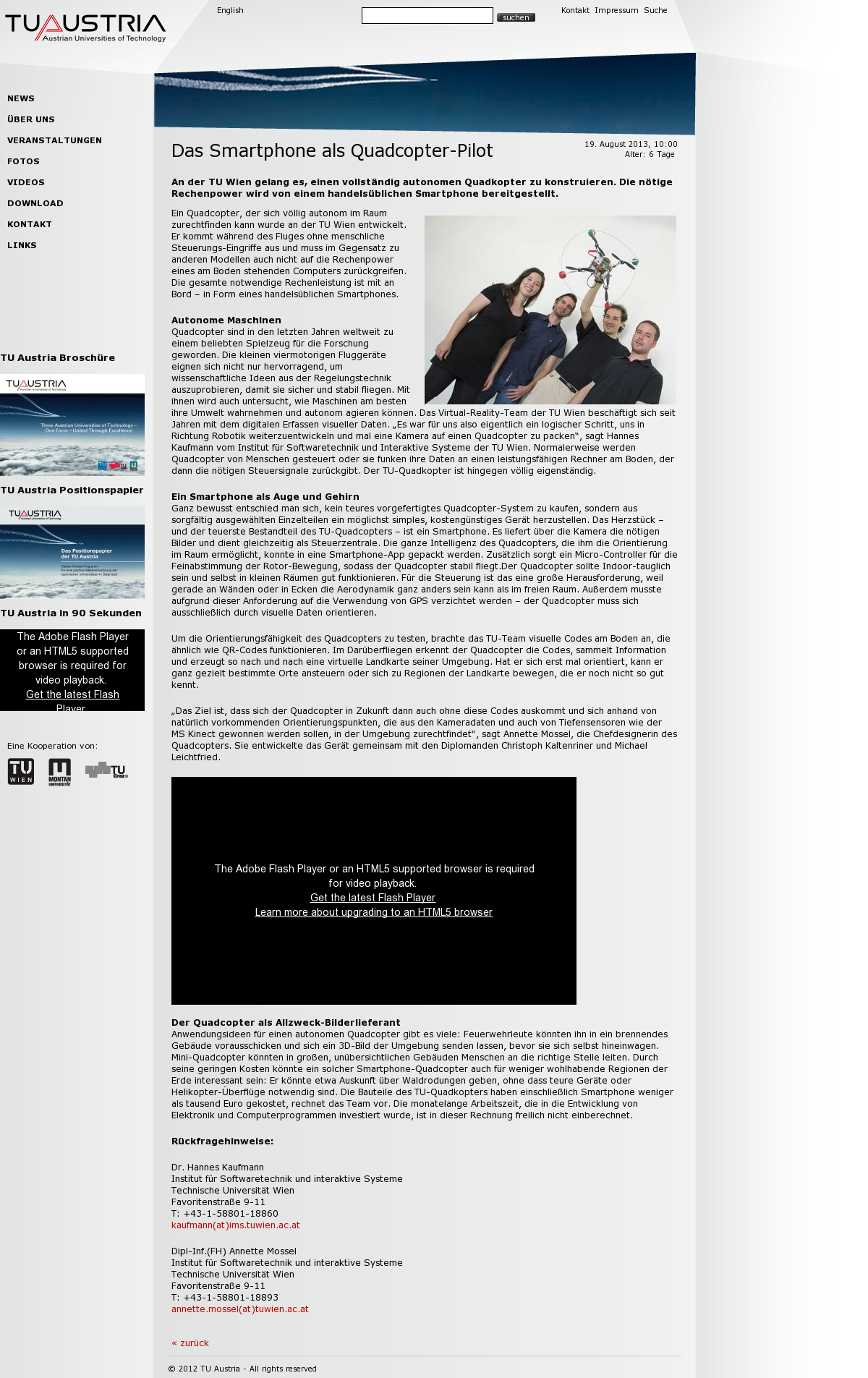
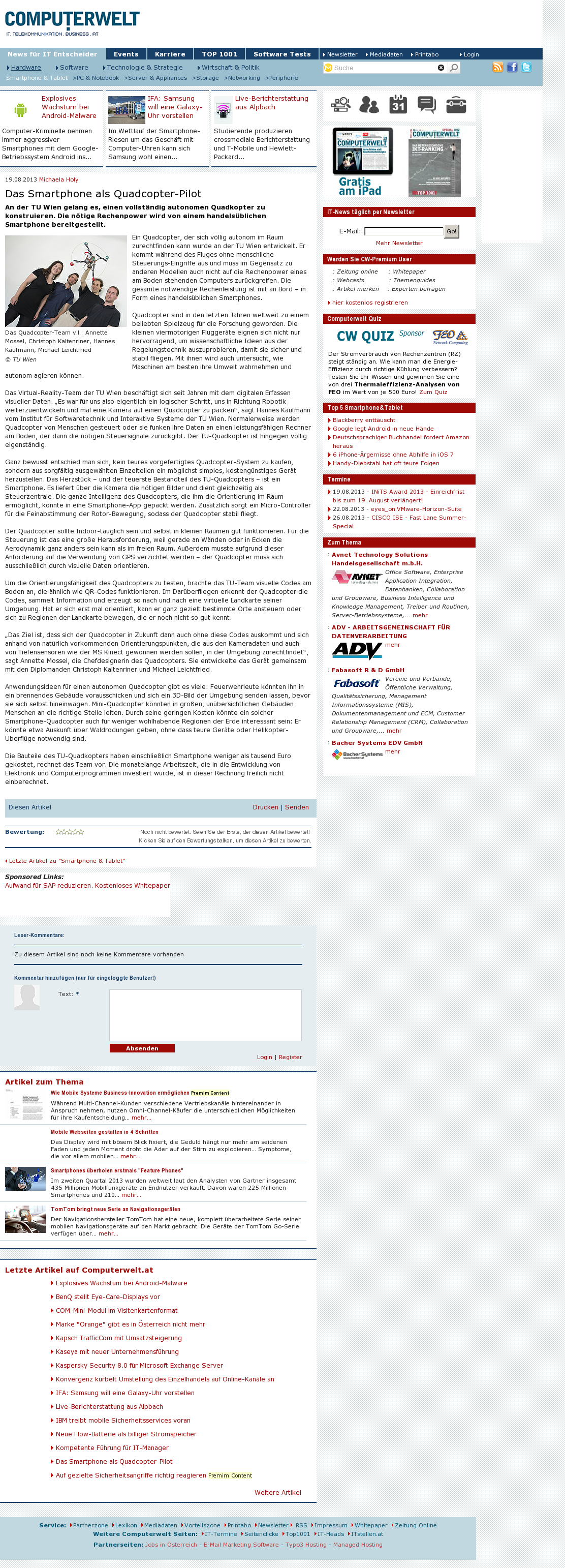
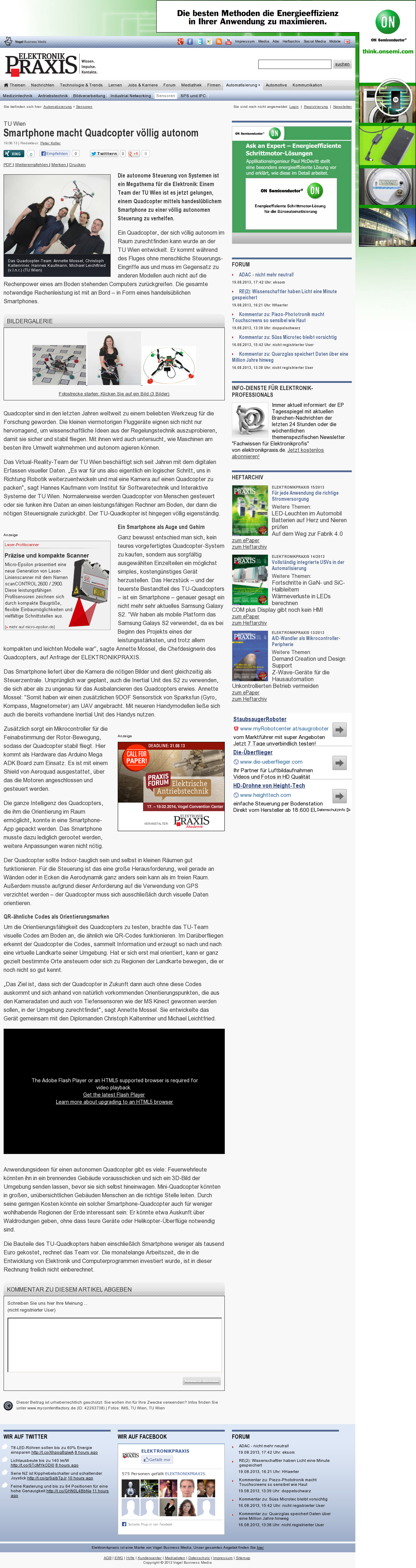
The SmartCopter v1.0 team: Annette, Christoph, Hannes and Michael (from left to right) |
![[JPG] SmartCopter Prototype](/projects/smartcopter/downloads/prototype-v3.jpg)
![[JPG] SmartCopter Team](/projects/smartcopter/downloads/smartcopter-team.jpg)
Awards
|
|
Our publication "Autonomous Flight using a Smartphone as On-Board Processing Unit in GPS-Denied Environments" was awarded for Best Paper at the 11th International Conference on Advances in Mobile Computing and Multimedia (MoMM 2013). |
Publications
2014
| SmartCopter - Enabling Autonomous Flight in Indoor Environments with a Smartphone as On-Board Processing Unit We present a low-cost Unmanned Aerial Vehicle (UAV) for autonomous flight and navigation in GPS-denied environments using an off-the-shelf smartphone… | A. Mossel, M. Leichtfried, C. Kaltenriener, H. Kaufmann | Details |
2013
| Autonomous Flight using a Smartphone as On-Board Processing Unit in GPS-Denied Environments In this paper, we present a low-weight and low-cost Unmanned Aerial Vehicle (UAV) for autonomous flight and navigation in GPS-denied environments… | M. Leichtfried, C. Kaltenriner, A. Mossel, H. Kaufmann | Details |
| Autonome Lokalisierung und Navigation eines unbemannten Luftfahrzeugs (UAV) mithilfe eines Smartphones als zentrale Recheneinheit An UAV (Unmanned Aerial Vehicle) is an aircraft flying without an on-board human pilot. For example they can be utilized to explore for human… | C. Kaltenriner, M. Leichtfried | Details |
Topics & Tasks
In Progress
| 0432 | Mobile Localization and Mapping using Visual Features To enable autonomous flight of a unmanned aerial vehicle (UAV), the UAV must be aware of its position and orientation in space. This remains a… | A. Mossel, H. Kaufmann | Details |
Completed
| 0439 | DepthSLAM on a Mobile Device Simultaneous localization and mapping (SLAM) using depth data from structured light (i.e. MS Kinect) has become very popular in recent years to… | A. Mossel | Details |
| 0406 | Fly a Multicopter using an Immersive Virtual Realiy Setup Multicopters have become popular and wide spread in recent years. While consumer hardware is still manually controlled by a pilot using a standard… | A. Mossel | Details |
| 0381 | Printed SmartCopter Within the practicum, a printable frame to be used for the SmartCopter is designed, printed and tested. Furthermore, the drift correction in the… | A. Mossel | Details |
| 0248 | Autonomous flight of a low-cost UAV The master thesis aim is to design and construct an UAV with low cost, off the shelf hardware and implement autonomous flight control in a 2D marker… | A. Mossel, H. Kaufmann | Details |
Press Coverage
October 2015
| ITA - Institut für Technikfolgen Abschätzung | Wenn Drohnen vom Himmel fallen | Oct 20, 2015 | Screenshot |
| APA | Invasion der Drohnen braucht rechtlichen Rahmen | Oct 20, 2015 | – |
| ORF Science | Invasion der Drohnen | Oct 20, 2015 | Screenshot |
| Der Standard (Wissenschaft) | Invastion der Drohnen braucht rechtlichen Rahmen | Oct 20, 2015 | Screenshot |
{kind=link}
{kind=link}
{kind=link}
February 2014
| W24 | Zukunft im Alltag: Quadcopter Drone hebt ab | Feb 11, 2014 | Screenshot |
{kind=link}
December 2013
| Focus-News | Малък безпилотен самолет може да използва ума на смартфон | Dec 13, 2013 | Screenshot |
| Tech.163 | 研究人员基于智能手机打造廉价无人机 | Dec 12, 2013 | Screenshot |
| MIT Technology Review | Drone Gets Its Smarts from a Smartphone | Dec 12, 2013 | Screenshot |
| OKTO TV | Strawanza: Künstlich (Minute 10:00 - 11:30) | Dec 10, 2013 | Screenshot |
| Raumgeometrie schule.at | Drohnen: Fliegende Roboter als "Dienstleister"? | Dec 04, 2013 | Screenshot |
| ORF ZIB 2 (TV) | Amazon-Prime Drohnen (Interview) | Dec 02, 2013 | Screenshot |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
November 2013
| Servus TV | TM Wissen: Das Smartphone als Quadcopter-Pilot (Studiogäste) | Nov 24, 2013 | Screenshot |
{kind=link}
September 2013
| REUTERS TV | Autonomous quadcopter takes humans out of flying equation | Sep 19, 2013 | Screenshot |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}